Hedrick, Tyson L.
Professor
Associate Chair, Space
thedrick@email.unc.edu
G40 A Wilson Hall
(919) 962-0757 (office)
How do animals produce and control movement? How does a network of muscles, rigid elements and neurons – components of varying quality and with temporally varying responses – generate robust outputs in the face of uncertain circumstances? For example, the flight of the sphingid moth Manduca sexta is enabled by a complex, hierarchical biological system that involves processes and components at several different levels: the nervous system of the moth activates a suite of 20 flight muscles which actuate mechanical structures (the wings) that do work on the surrounding fluid (air), generating forces to support and propel the moth. These forces lead to changes in position and orientation which are detected by the sensory system and then used, along with underlying feedforward patterns as the basis for future muscle activation patterns, continuing the process and keeping the moth in the air.
Specific Areas of Research:
- Aerodynamics of bird and insect flight
- Neuromuscular and sensory control in animal flight
- Computational approaches to organismal biomechanics
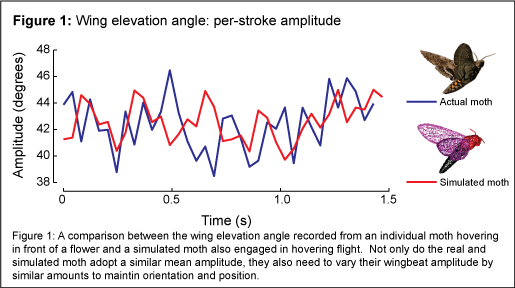
I apply both experimental and computational modeling approaches to these questions, iterating between the two approaches. For example, the figure below shows the wingbeat to wingbeat variation in wing motion during stable hovering flight for both a real moth and a computational model of the moth. In both the model and organism, steady flight behaviour requires continuous slight adjustments.
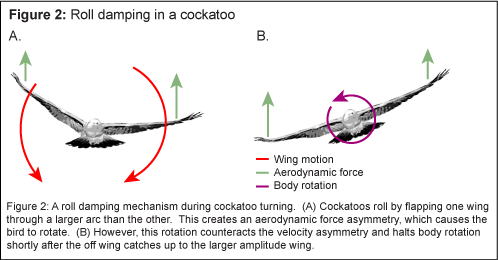
In addition to investigating the underlying variation of steady locomotion, I also make direct measurements from animals engaged in maneuvering or other unsteady movements. Figure 2 (below) outlines the basis of roll damping in the flapping flight of birds. Surprisingly high roll damping coefficients allow birds to control roll orientation with simple changes in wingbeat amplitude and passively dissipate roll velocity once symmetric flapping resumes.